Franka Toolbox for MATLAB
Franka MATLAB 工具箱含一组库和工具,用于将 Franka 机器人与 MathWorks® 软件生态系统集成。
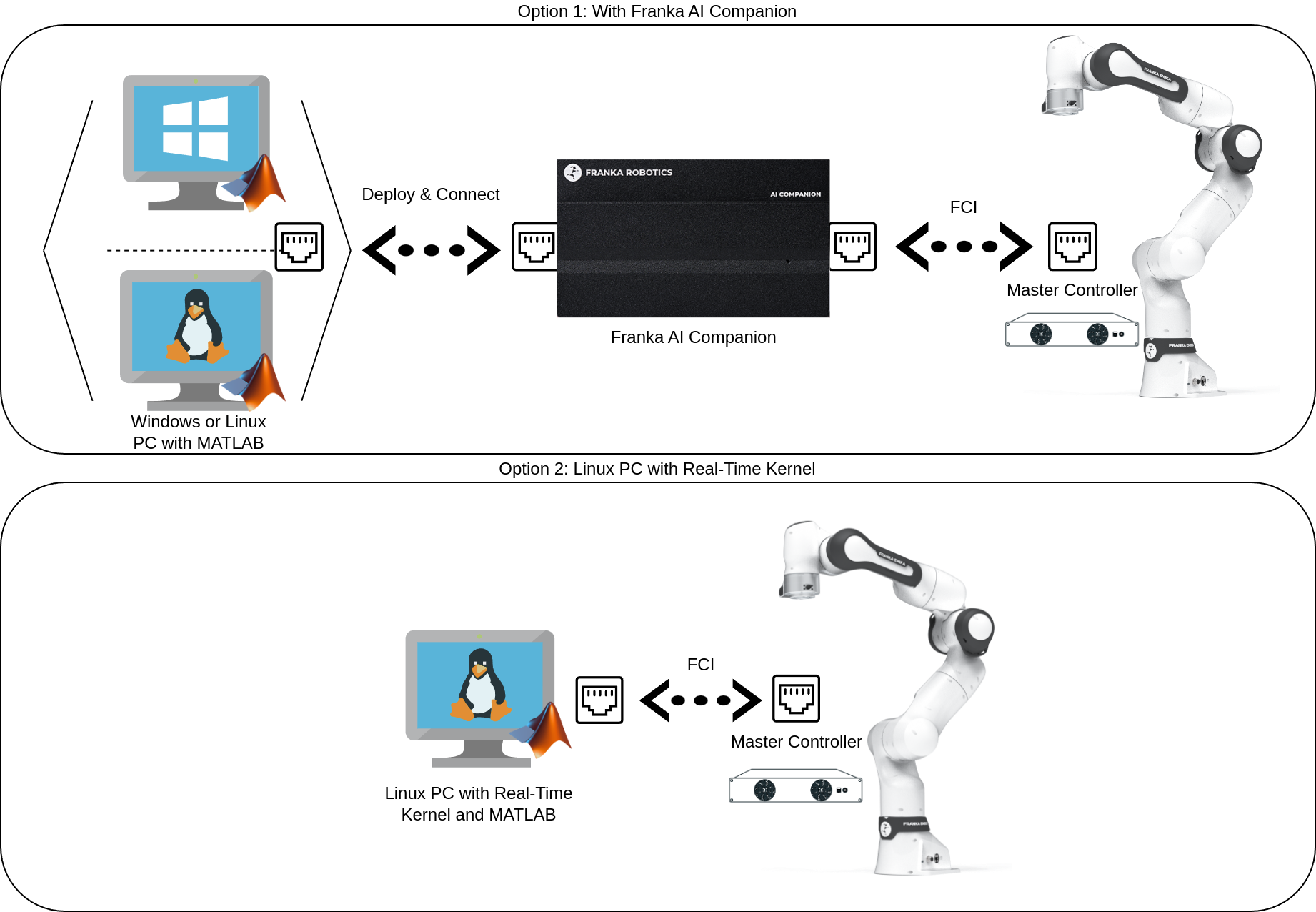
Franka MATLAB 工具箱的硬件/软件配置选项。
该工具箱包括两个主要组件:
Franka Simulink 库,一组用于通过 Simulink Coder 进行自动 C++ 代码生成来与 Franka 机器人接口的 Simulink 模块。该库主要旨在帮助快速开发高级机器人控制器。
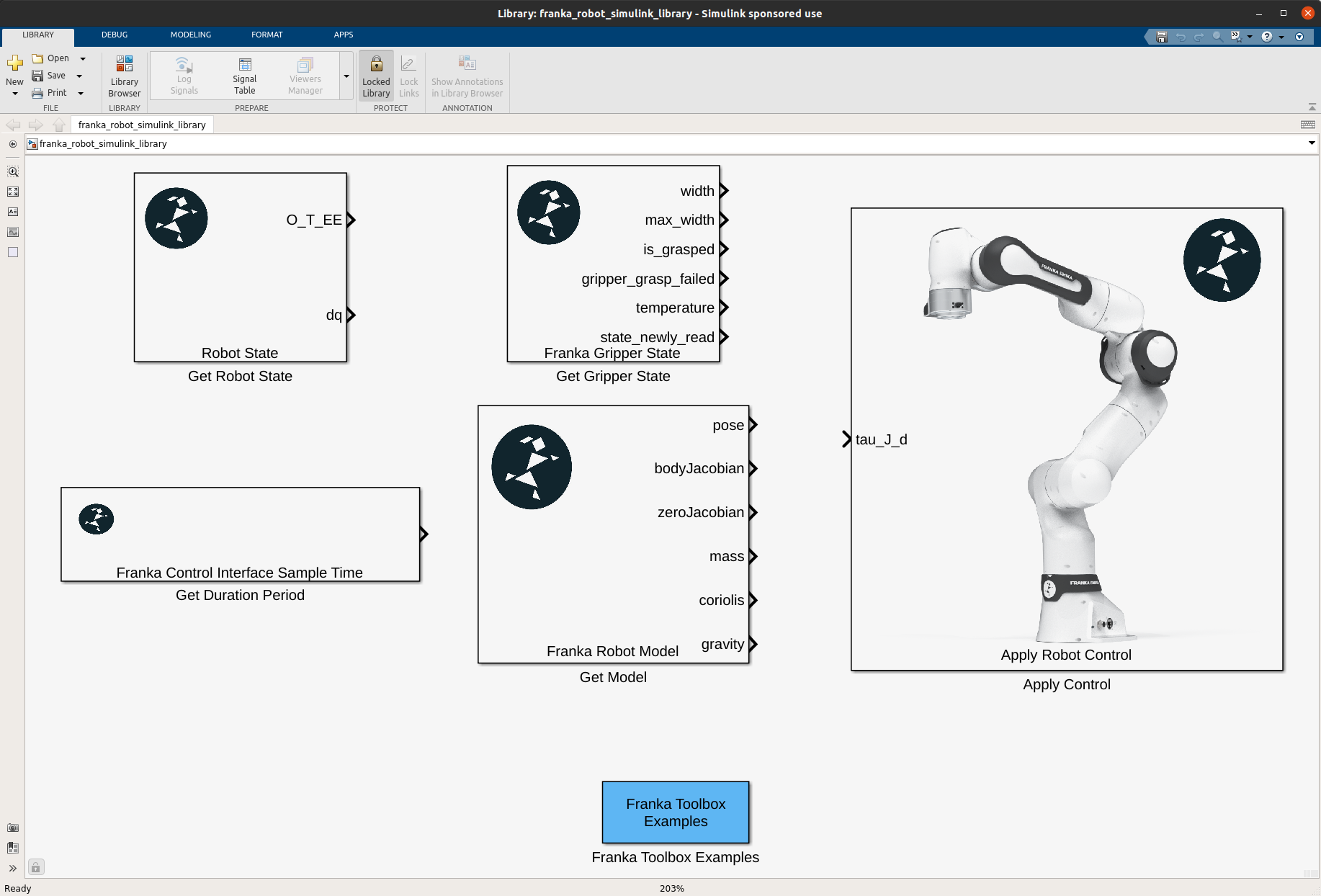
用于 Franka 机器人控制器的快速原型开发的 Simulink 库。
Franka MATLAB 库,提供了 FrankaRobot() MATLAB 类,用于直接与 Franka 机器人进行接口交互。
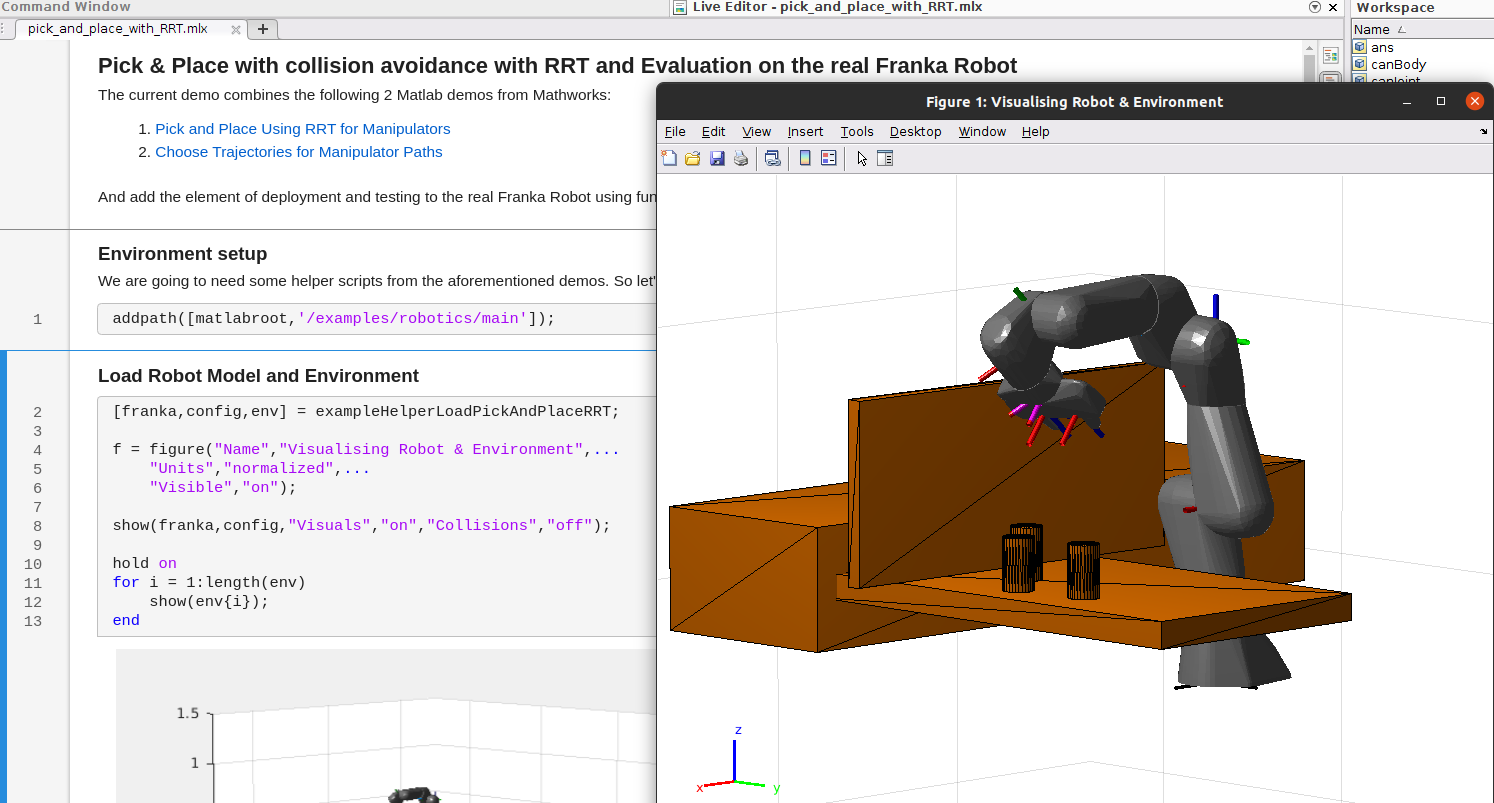
使用RRT(快速扩展随机树 Rapidly-exploring Random Tree)实现的一个取放操作示例,采用MATLAB Live Script编写。