入门指南
在为 Linux 设置所需的软件后,是时候连接到机器人并通过使用 FCI 读取当前机器人状态来测试整个设置了。
操作机器人
在继续之前,这里有一些安全注意事项。在给机器人通电之前,请务必检查以下事项:
确保手臂已安装在稳定的底座上并且不会翻倒,即使在执行快速运动或突然停止时也不会翻倒。
小心
仅支持桌面安装,即手臂必须垂直于地面安装!其他安装将 使失去保修,并 可能导致机器人损坏!
确保连接机械臂和控制器的电缆在两侧牢固连接。
将外部激活设备(灰色按钮)连接到机械臂的底座 X3 口并将其放置在身边,以便能够随时停止机器人。
提示
激活外部激活设备(即按下灰色按钮)将使机械臂脱离控制。关节电机控制器将保持其当前位置。 外部激活设备不是紧急停止装置!
这份清单并不详尽!机器人随附的手册中有一章专门介绍安全。请仔细阅读并按照说明进行操作。该手册也可以在我们的 Franka World Hub 中找到。
重要
使用 FCI 给机器人发送命令的工作站 PC 必须始终连接到控制器的 LAN 端口(shop floor network),而 不是 连接到机械臂(robot network)的 LAN 端口。
安装 FCI Feature
为了能够通过 Franka 控制接口(FCI)操作机器人,需要在设备上安装相应的 Feature。如果它已经安装到控制器上,它将在 DESK -> Settings -> System -> Installed Features 下列出。如果尚未安装 FCI,可以将其从 Franka World 帐户同步到控制器。因此,公司/学校帐户中必须有可用的 FCI 许可证,并且控制器必须在此帐户中注册。软件(离线/在线)同步过程在 Franka World 用户手册 中有更详细的描述。(对于中国的用户,您的机器人可能被统一账户管理,可以联系您的服务商了解更多详情)
设置网络
使用 FCI 控制机器人时,良好的网络性能至关重要。因此强烈建议在工作站 PC 和机器人控制器之间选择(网线)直接连接。本节将介绍如何为此例配置网络。

通过 FCI 控制机器人时使用控制器的网口。不要连接到机械臂底座的网口。
控制器和工作站必须配置在同一网段上。实现这一目标的最简单方法是使用静态 IP 地址。同一网段上的任何两个地址都可以使用,但本教程将使用以下值:
工作站 PC |
控制器 |
|
|---|---|---|
IP 地址 |
172.16.0.1 |
172.16.0.2 |
网络掩码 |
24 |
24 |
控制器的 IP 地址(172.16.0.2)在后面的章节中会被以 <fci-ip> 调用。
提示
使用此网络配置,可以通过 https://<fci-ip> 访问 Desk,尽管会在浏览器中看到证书警告。
配置过程包括两个步骤:
配置控制器的网络设置。
配置工作站的网络设置。
控制器网络配置
对于这一步,需要安装和测试机器人。 在继续下一步之前,请通读机器人随附的文档并按照设置说明进行操作!
系统版本 >= 5.5.0 时,可以在设置界面中配置控制器的网络。在此步骤期间,可以通过机器人基座中的端口连接到机器人。有关详细信息,请参阅机器人随附的手册中的 连接用户界面设备 章节。

通过 Desk 进入 Franka 的设置界面。
要设置静态地址,请在 Network 部分输入以下值:
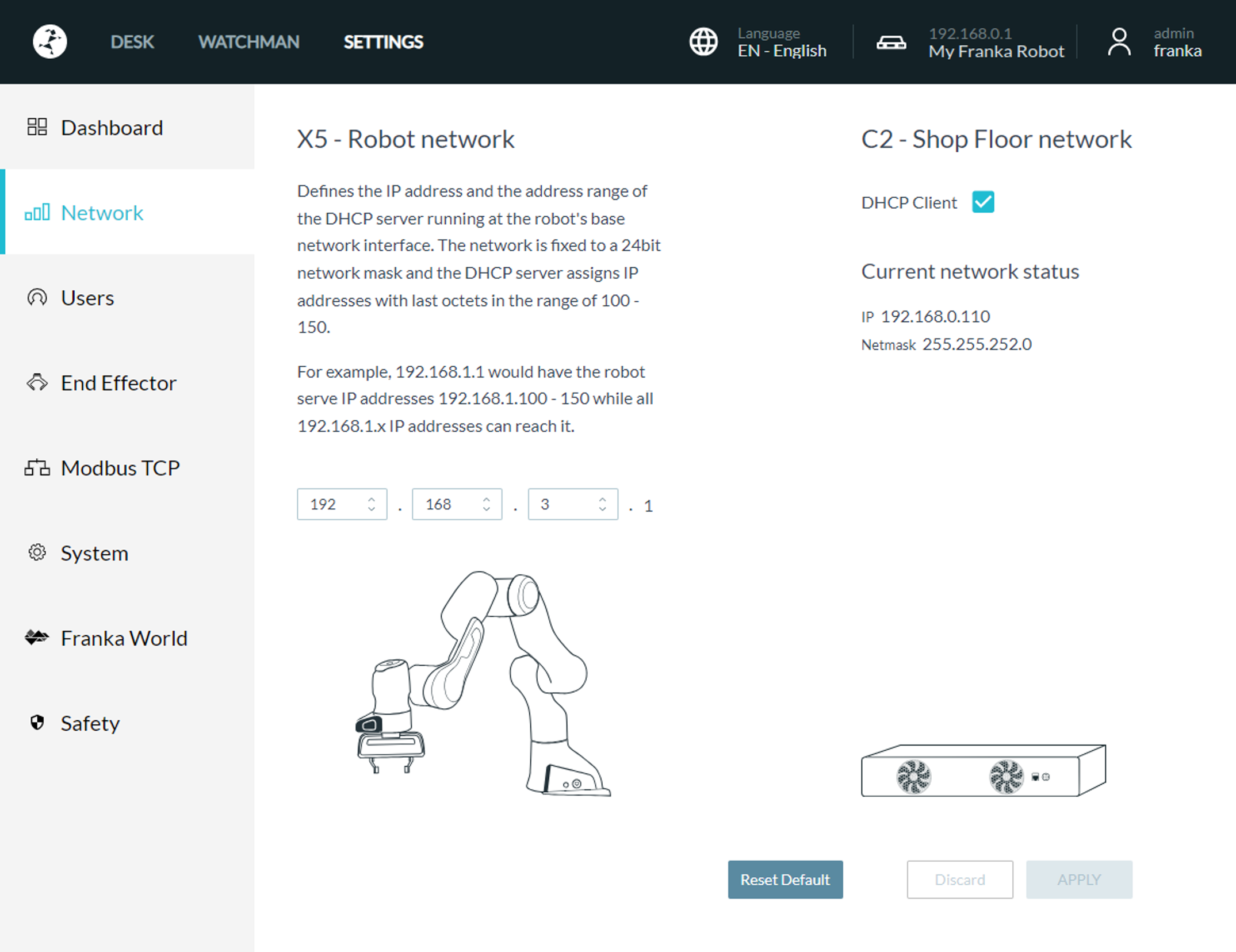
为控制器的 LAN 端口(Shop Floor network)设置静态 IP。取消选择 DHCP 客户端选项。
按下 Apply。成功应用设置后,将工作站的网口连接到机器人的控制器。
Linux 工作站网络配置
本节介绍如何使用 GUI 在 Ubuntu 16.04 上设置静态 IP 地址。如果更喜欢使用命令行,请遵循官方 Ubuntu 指南。
小心
以下步骤将修改网络设置。如有疑问,请联系网络管理员。
首先,打开网络连接(Network Connection)小控件。选择要使用的有线连接,然后单击编辑。
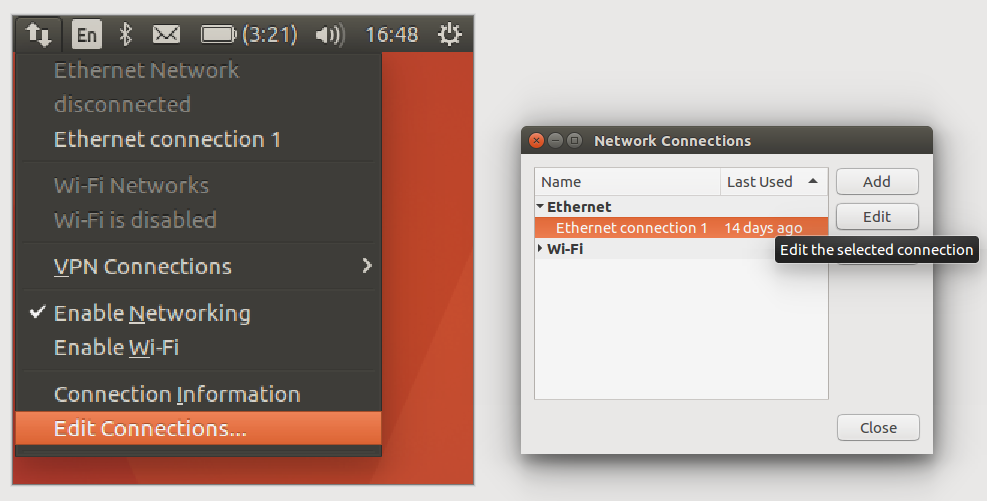
在以太网部分编辑连接。
接下来,单击 IPv4 设置选项卡,将方法设置为手动,然后输入以下值:
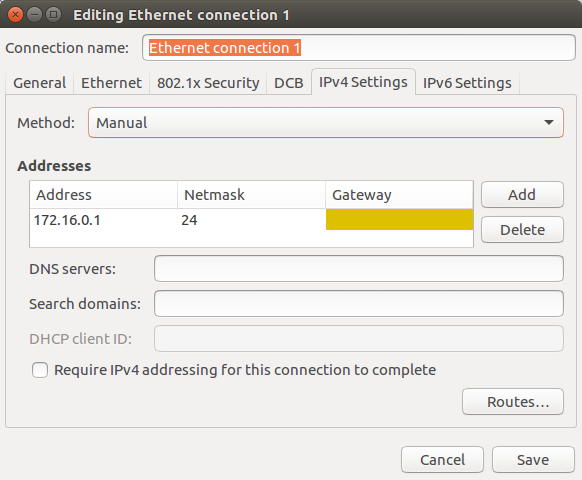
为工作站 PC 设置静态 IP。方法设置为手动。
提示
此步骤将禁用 DHCP 服务,这意味着在连接到 DHCP 服务器时将不再获得地址,例如机械臂基座中的服务器。当不再使用 FCI 时,可以将方法更改回 Automatic (DHCP)。
保存更改,然后关闭网络连接窗口。从下拉菜单中单击连接名称。现在应该可以从工作站连接到机器人。要验证这一点,请执行 网络带宽、延迟和抖动测试。从现在开始,还可以在浏览器中通过此地址访问 Desk。
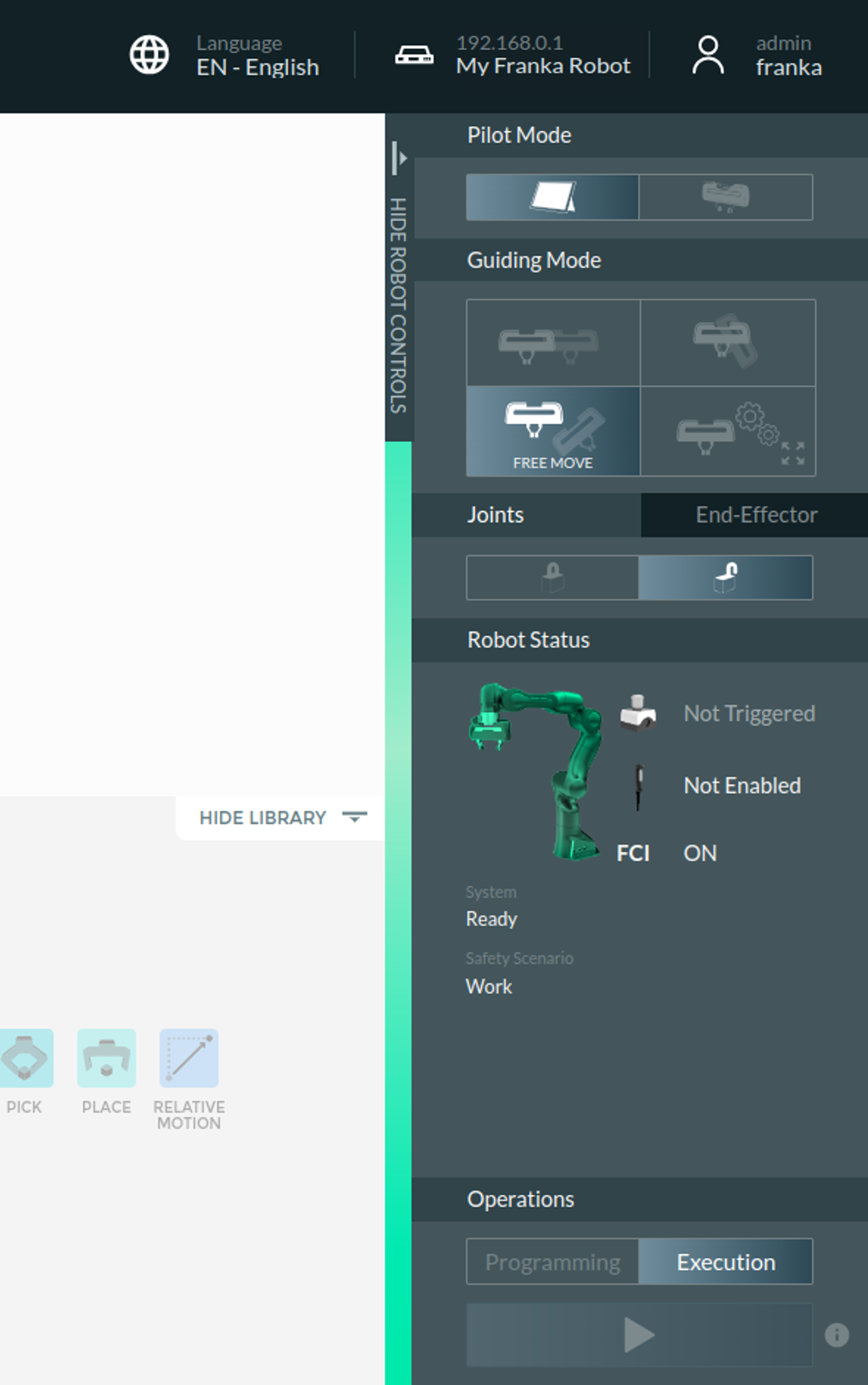
在 Desk 中为使用 FCI 的机器人做准备
为了验证连接,需要在 Desk 中解锁机器人的抱闸并释放激活装置(灰色按钮),以便机器人准备好执行蓝色 LED 模式(运行模式)指示的操作。
激活 FCI 模式
要激活 FCI 模式,请打开 Desk,然后解锁机器人抱闸,并展开顶栏中的菜单。最后,点击 ‘Activate FCI’ 。
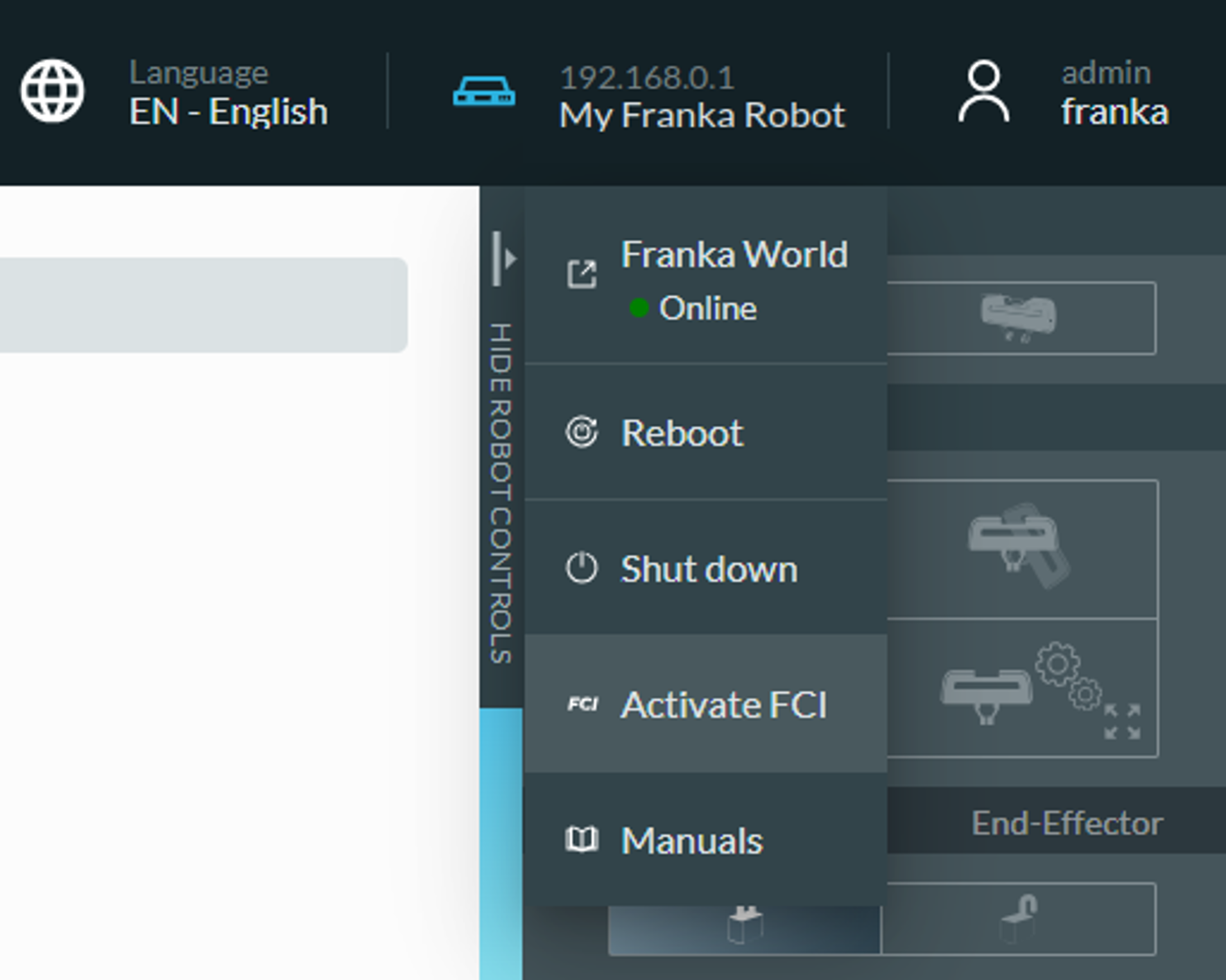
在 Desk 顶栏菜单中激活 FCI 模式(系统版本 >= 5.5.0)
Panda 的 FCI 模式
激活 FCI 模式后,会出现如下所示的弹窗。此弹出窗口表示 FCI 模式当前处于激活状态,并且处于激活状态时不允许 Desk 交互。在使用 FCI 时,此弹出窗口需要保持打开状态 。有关单点控制 Single Point of Control (SPoC) 的更多信息,请参阅机器人随附的手册,该手册也可在我们的 Franka World Hub 中找到。
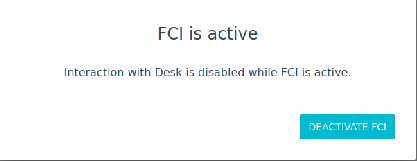
激活 FCI 模式时的弹窗
Franka Research 3 的 FCI 模式
激活FCI模式后,会出现一个弹窗,然后用户需要确认。
 |
 |
验证连接
上一节描述了如何设定控制器 LAN 端口的 IP 地址。在后文中,该地址称为 <fci-ip>。
为了验证一切设置是否正确,请确保 在 Desk 中为使用 FCI 的机器人做准备 。并从 libfranka 运行示例 echo_robot_state。如果决定从 ROS 存储库安装 franka_ros 和 libfranka,可以改为阅读 在ros中可视化机器人 的说明 。
切换到构建目录 libfranka 并执行示例:
./examples/echo_robot_state <fci-ip>
该程序会将机器人的当前状态打印到控制台并在几次迭代后终止。在 机器人状态 RobotState 中解释了这些字段的含义。
示例输出:
{
"O_T_EE": [0.998578,0.0328747,-0.0417381,0,0.0335224,-0.999317,0.0149157,0,-0.04122,-0.016294,
-0.999017,0,0.305468,-0.00814133,0.483198,1],
"O_T_EE_d": [0.998582,0.0329548,-0.041575,0,0.0336027,-0.999313,0.0149824,0,-0.0410535,
-0.0163585,-0.999023,0,0.305444,-0.00810967,0.483251,1],
"F_T_EE": [0.7071,-0.7071,0,0,0.7071,0.7071,0,0,0,0,1,0,0,0,0.1034,1],
"EE_T_K": [1,0,0,0,0,1,0,0,0,0,1,0,0,0,0,1],
"m_ee": 0.73, "F_x_Cee": [-0.01,0,0.03], "I_ee": [0.001,0,0,0,0.0025,0,0,0,0.0017],
"m_load": 0, "F_x_Cload": [0,0,0], "I_load": [0,0,0,0,0,0,0,0,0],
"m_total": 0.73, "F_x_Ctotal": [-0.01,0,0.03], "I_total": [0.001,0,0,0,0.0025,0,0,0,0.0017],
"elbow": [-0.0207622,-1], "elbow_d": [-0.0206678,-1],
"tau_J": [-0.00359774,-5.08582,0.105732,21.8135,0.63253,2.18121,-0.0481953],
"tau_J_d": [0,0,0,0,0,0,0],
"dtau_J": [-54.0161,-18.9808,-64.6899,-64.2609,14.1561,28.5654,-11.1858],
"q": [0.0167305,-0.762614,-0.0207622,-2.34352,-0.0305686,1.53975,0.753872],
"dq": [0.00785939,0.00189343,0.00932415,0.0135431,-0.00220327,-0.00492024,0.00213604],
"q_d": [0.0167347,-0.762775,-0.0206678,-2.34352,-0.0305677,1.53975,0.753862],
"dq_d": [0,0,0,0,0,0,0],
"joint_contact": [0,0,0,0,0,0,0], "cartesian_contact": [0,0,0,0,0,0],
"joint_collision": [0,0,0,0,0,0,0], "cartesian_collision": [0,0,0,0,0,0],
"tau_ext_hat_filtered": [0.00187271,-0.700316,0.386035,0.0914781,-0.117258,-0.00667777,
-0.0252562],
"O_F_ext_hat_K": [-2.06065,0.45889,-0.150951,-0.482791,-1.39347,0.109695],
"K_F_ext_hat_K": [-2.03638,-0.529916,0.228266,-0.275938,0.434583,0.0317351],
"theta": [0.01673,-0.763341,-0.0207471,-2.34041,-0.0304783,1.54006,0.753865],
"dtheta": [0,0,0,0,0,0,0],
"current_errors": [], "last_motion_errors": [],
"control_command_success_rate": 0, "robot_mode": "Idle", "time": 3781435
}
提示
如果此时出现错误,请执行 ping 测试 并确保机器人的故障保护安全锁止系统已打开。机器人随附的手册中提供了更多信息。