故障排除
提示
查看 Franka 社区 和 Franka_matlab 类别 以获取相关帖子或创建新帖子!
错误:control_modes.h: No such file or directory
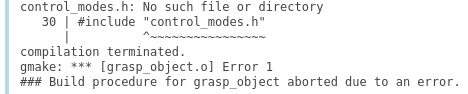
当仅存在 “apply control is present” 时,simulink 中会出现构建错误消息。
这是系统当前的已知限制,因为如果 simulink 模型中仅存在 “apply control” 块,构建过程就会失败。
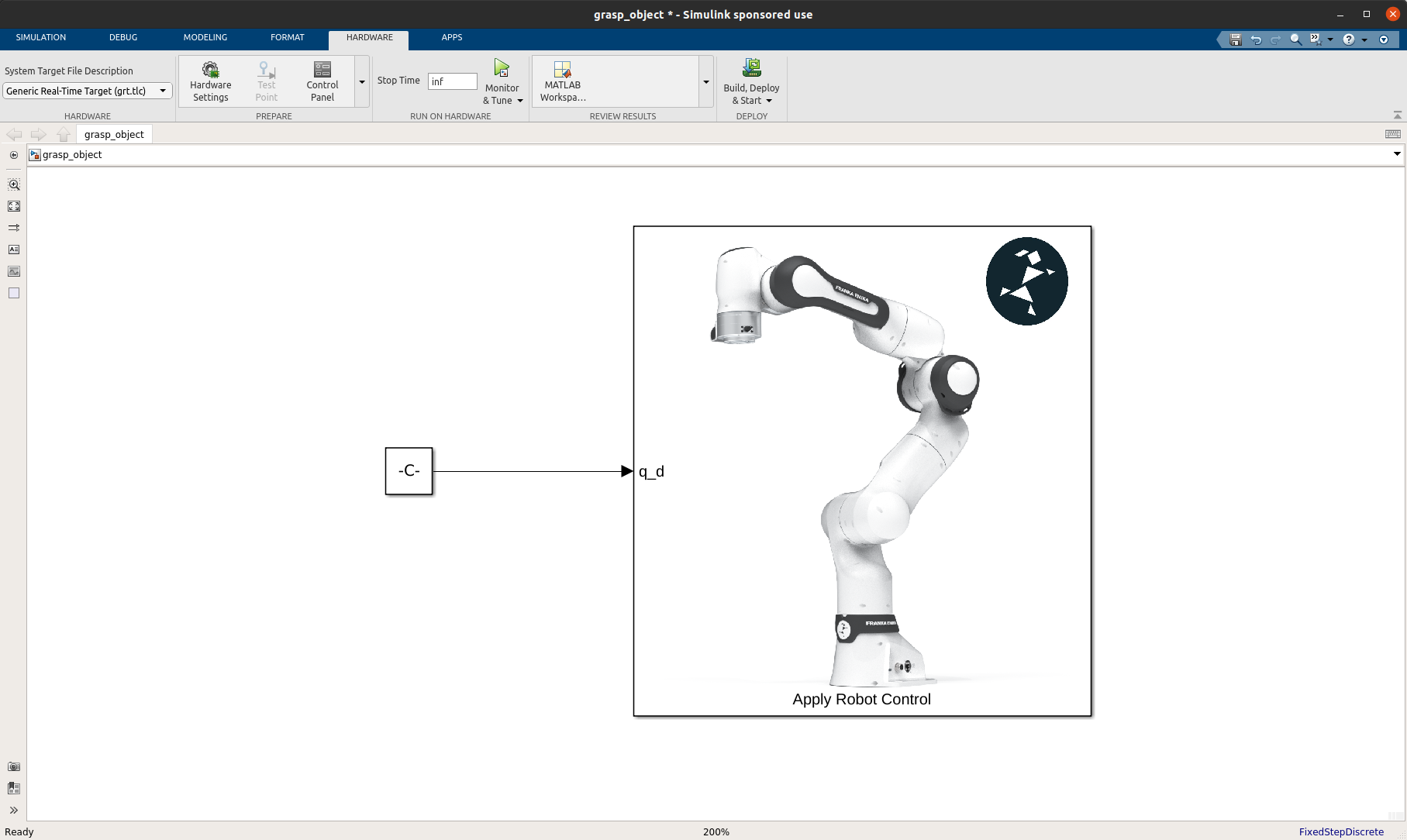
仅具有 “apply control” 的 Simulink 模型示例。构建将失败。
要解决该问题,只需包含 Franka Simulink 库中的任何其他块,例如,如果不使用这模块,把它连上终端。
通过包含 Franka Simulink 库中的任何其他块来修复 “control_modes.h: No such file or directory error.” 。
missing “MW_custom_RTOS_header.h”
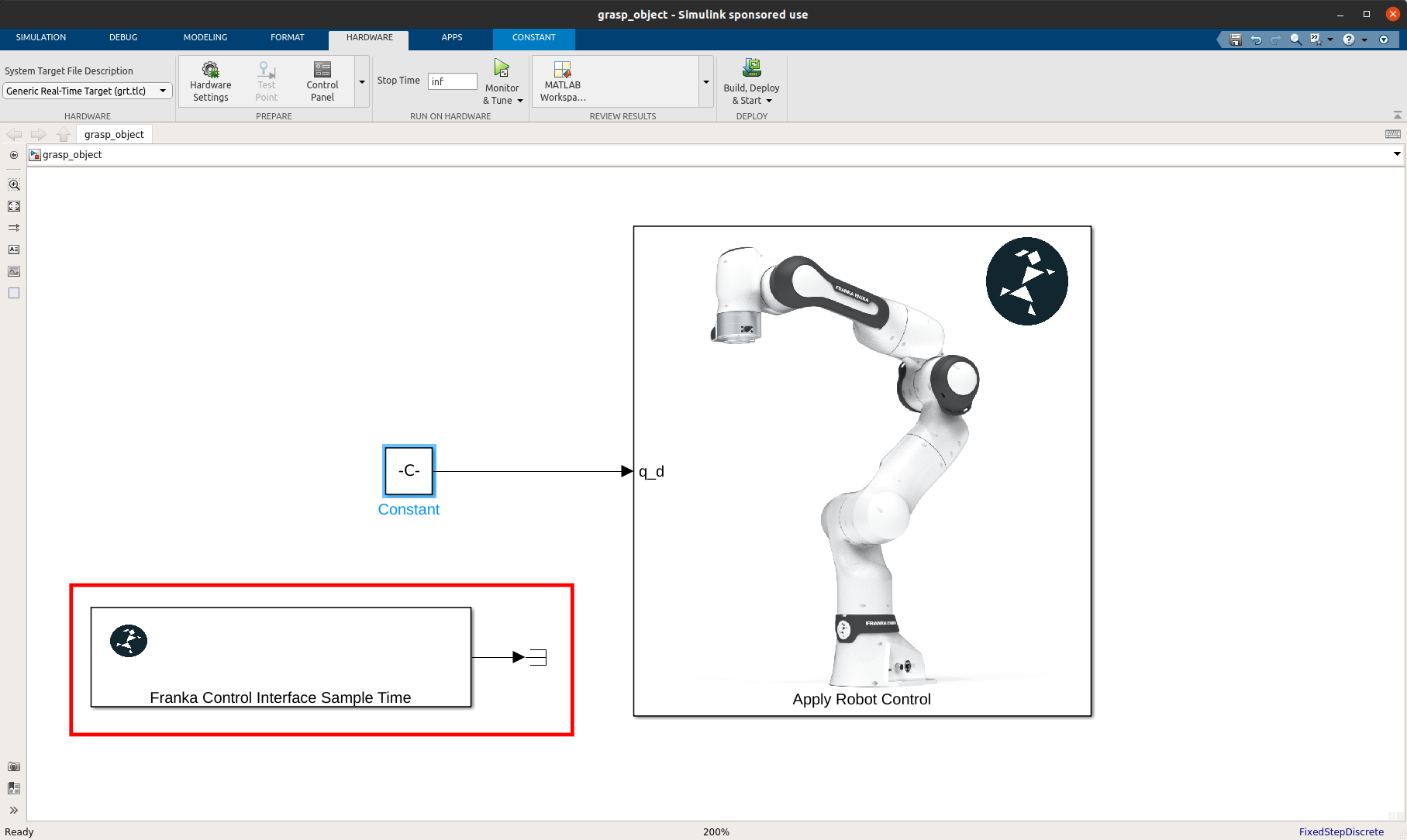
在使用 AI Companion 或 NVIDIA Jetson 平台时,如果遇到与缺少 “MW_custom_RTOS_header.h” 相关的错误,您可以尝试强制重置 NVIDIA Simulink 代码生成设置:
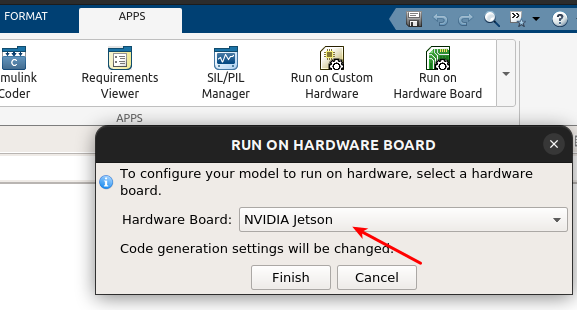
通过强制重置 Simulink Jetson 相关设置来修复 “缺少 MW_custom_RTOS_header.h” 错误。
libfranka 参考
提示
与 libfranka 相同的错误消息和建议的故障排除适用。
Linux 中显卡驱动程序的问题
NVIDIA 的显卡驱动程序在具有实时内核的 Linux 中不受官方支持。这可能会导致 Matlab 和 Simulink 中的图形渲染出现问题,例如图形窗口(figures)和示波器(scopes)模块在图形渲染方面可能出现问题。所以,我们建议使用 -softwareopengl 启动 matlab 以避免这些问题:
$ matlab -softwareopengl
libstdc++.so 和其他系统动态库的问题
确保您已为系统安装了 matlab-support 包 ,以便 Matlab 引用系统动态库而不是其附带的预编译库:
sudo apt install matlab-support
Franka Simulink 库的模块实例数量
重要
Simulink 库专为快速原型化机器人控制器而设计,仅针对单个机器人。不鼓励使用多个Apply Control模块实例,因为尚未测试过。可以使用所有其他 Simulink 块的多个实例,只要它们指向同一个机器人 IP 即可。