Franka Simulink 库 - 参考
提示
关于输入/输出信号的命名法、数据类型和大小,已经完全采用了 libfranka 的定义。可以在 此处 查看完整的信号列表。同时,也采用了列优先格式(column-major format)来处理信号。
机器人控制
Robot Control Simulink 模块。
这是 Franka simulink 库的主要模块,它负责将所需的机器人参数和控制信号应用于机器人。
可以通过模块参数配置并应用机器人设置。
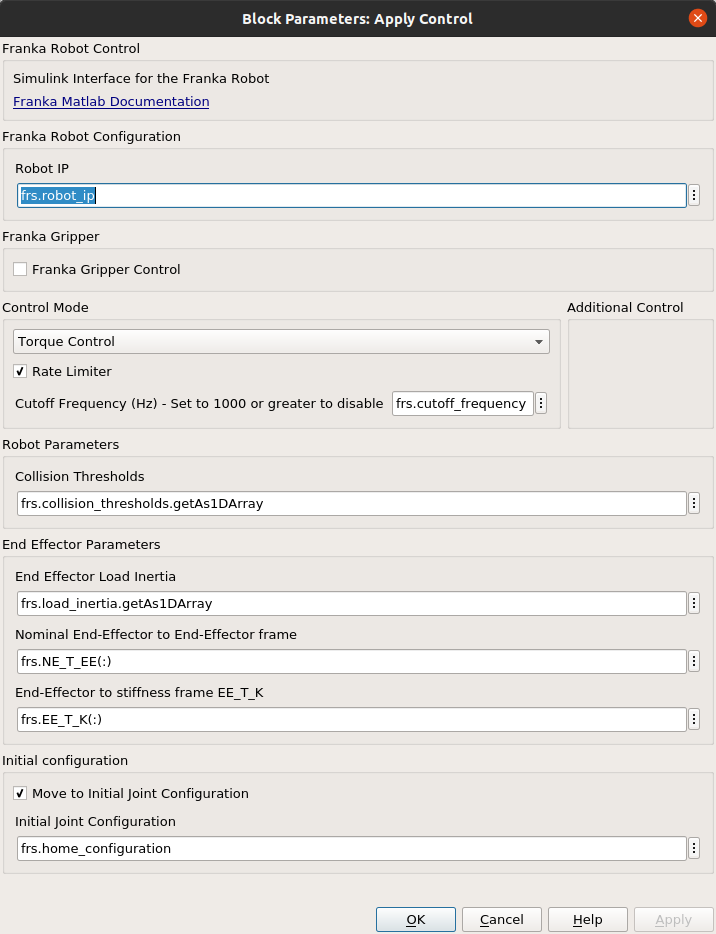
Robot Control Simulink 模块设置
提示
如果需要,可以在控制环路的 main 执行 之前 应用初始机器人配置。也就是说,机器人将先移动到所需配置,然后才会执行 Simulink 模型的 main。您可以在模块设置的 Initial Configuration 部分定义这一点。
机器人状态
Robot State Simulink 模块。
为了读取来自当前机器人状态的所需信号集,您可以在模块参数的 Parameters 面板中自由输入信号的名称。有关可用信号及其命名的完整列表,请参考 –> Robot State 属性
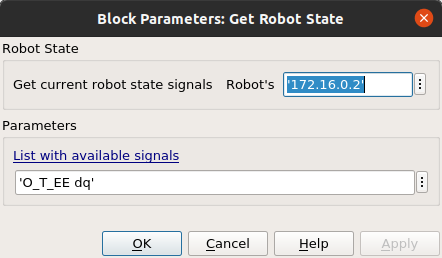
获取初始机器人状态的 Simulink 模块设置。
持续时间
获取上次主回调的持续时间(采样时间)的Simulink 模块。
此 Simulink 模块输出最后一个执行步骤的持续时间(以秒为单位)。理想情况下,这应该始终为 0.001 秒,但由于通信错误期间丢失数据包,可以看到 0.002 秒或 0.003 秒。
警告
在通信故障期间,Simulink 模型的计步 不会改变。即使实际上丢失了一个执行步骤,它仍会继续递增。因此,特别的设计考虑是必要的,特别是对于敏感的位置运动生成器。例如,请参考 generate_cartesian_pose_motion.slx 演示,了解应用程序的主时钟 “clock” 是如何设计的。
夹爪状态
获取当前夹爪状态的 Simulink 模块。
夹爪状态模块将告知应用程序当前的夹爪状态。
真空吸盘状态
获取当前真空吸盘状态的 Simulink 模块。
真空吸盘状态模块将告知应用程序当前的真空吸盘状态。
质量矩阵
获取机器人模型的质量矩阵
科里奥利力
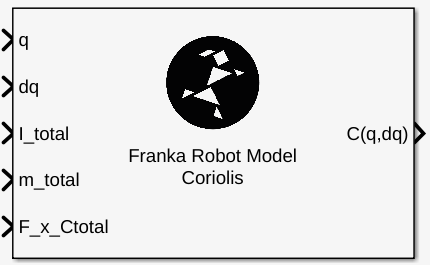
获取机器人模型的科里奥利矩阵
重力
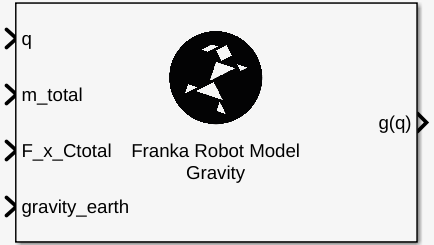
获取机器人模型的重力矢量
雅可比矩阵
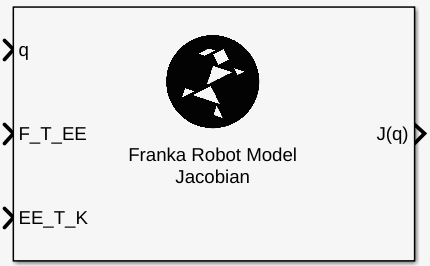
获取机器人的雅可比矩阵
你可以在模块参数中选择“零雅可比矩阵”(Zero Jacobian)或“主体雅可比矩阵”(Body Jacobian),以及所需的坐标系。
姿态
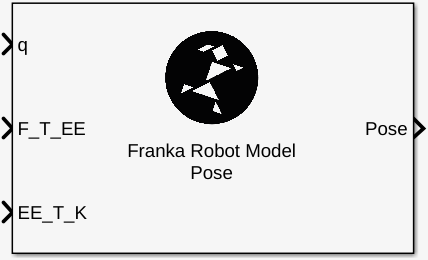
获取机器人姿态
你可以在模块参数中选择所需的姿态坐标系。