安装
安装方法
选项 1:拖放 franka.mltbx 文件
将 franka.mltbx 文件拖到 MATLAB 命令窗口中,并按照安装提示进行操作。
选项 2:通过编程方式
uiopen('<path to your franka.mltbx file>', 1);
许可管理与激活
1. 生成系统标识符
在 MATLAB 中执行以下命令以生成您系统的唯一标识符:
franka_toolbox_uid_gen()
2. 获取许可证
联系 Franka Robotics 或 义昂智能 提供您生成的标识符,以获取您的许可证号。
3. 激活许可证
对于 Franka Research 3 机器人:
franka_toolbox_install('<your_license_number>');
卸载
清理本地永久安装文件:
franka_toolbox_uninstall();
通过 MATLAB Add-Ons Manager 移除 Toolbox。
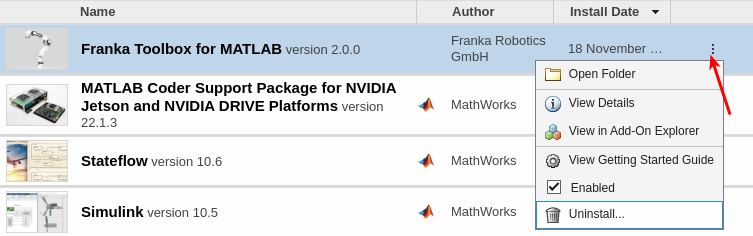
卸载 Franka Toolbox
切换到系统范围的 libfranka 安装(可选)
正如 为目标 PC 预编译的 libfranka 及第三方依赖项 部分所述,Toolbox 附带了预编译的 libfranka 及其所有适用于目标 PC 的第三方依赖项。
如果 Toolbox 预构建依赖项存在任何潜在问题,您可以随时从源代码为您的系统手动构建并安装 libfranka。
在这种情况下,请告诉 Toolbox ,以便它通过执行以下命令选择针对系统范围的 libfranka 安装进行构建:
franka_toolbox_libfranka_system_installation_set(true);
这将触发 Toolbox 以系统范围的 libfranka 安装为基础进行构建。
要恢复到 Toolbox 范围内的本地安装,您可以执行以下命令:
franka_toolbox_libfranka_system_installation_set(false);