franka_fr3_moveit_config
该软件包包含 MoveIt2 的配置文件。
运动组(Move Groups)
新增了一个名为 panda_manipulator 的运动组,其末端位于夹爪两指之间,并将 Z 轴旋转 -45 度,使得 X 轴朝向前方,从而更方便使用。原有的 panda_arm 运动组仍可用以保持向后兼容,但新应用推荐使用新的 panda_manipulator 运动组。
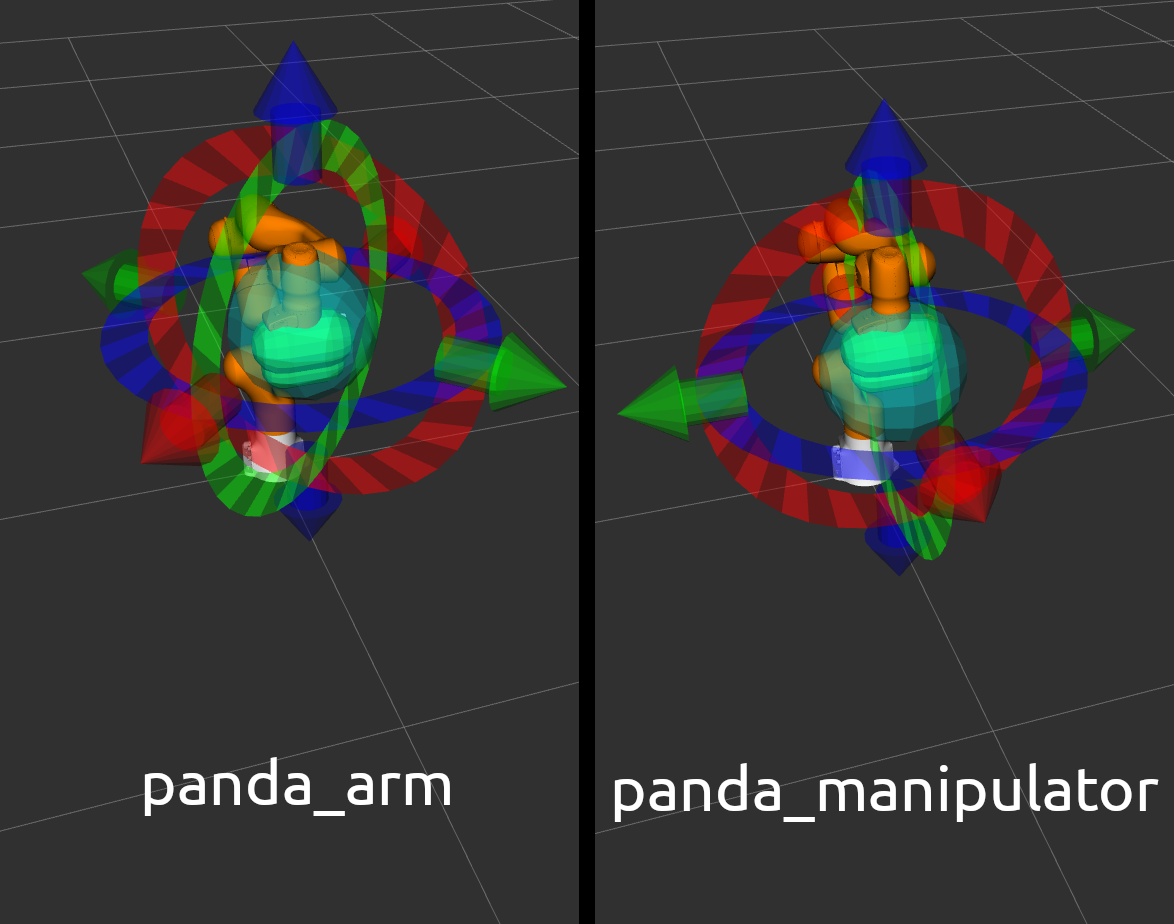
旧版与新版运动组的可视化对比
使用方法
要验证一切是否正常,可在机器人上运行 MoveIt 示例:
ros2 launch franka_fr3_moveit_config moveit.launch.py robot_ip:=<fci-ip>
然后在 RViz 中启用 MotionPlanning 显示。
如果没有实体机器人,也可以在虚拟硬件上测试配置:
ros2 launch franka_fr3_moveit_config moveit.launch.py robot_ip:=dont-care use_fake_hardware:=true
等待终端中出现 MoveIt 的绿色提示信息 You can start planning now!。然后关闭 PlanningScene,再重新打开,最后启用 MotionPlanning。
配置文件
该软件包包括以下内容:
FR3 机器人的运动规划配置
关节限制与安全设置
规划组与连杆配置
运动学求解器配置(kinematics.yaml)
对于“关节阻抗 + 逆运动学示例 (Joint Impedance With IK Example)”控制器,可以在本软件包的 kinematics.yaml 文件中修改所使用的运动学求解器。