Research


全新
FRANKA RESEARCH 3
前沿人工智能和机器人研究的首选平台
Franka Research 3 是世界一流的力感应机器人系统,为研究人员提供简单易用的机器人功能,以及机器人控制和学习能力的底层访问权限。
人工智能和机器人工具套件
了解报价中包含的内容。

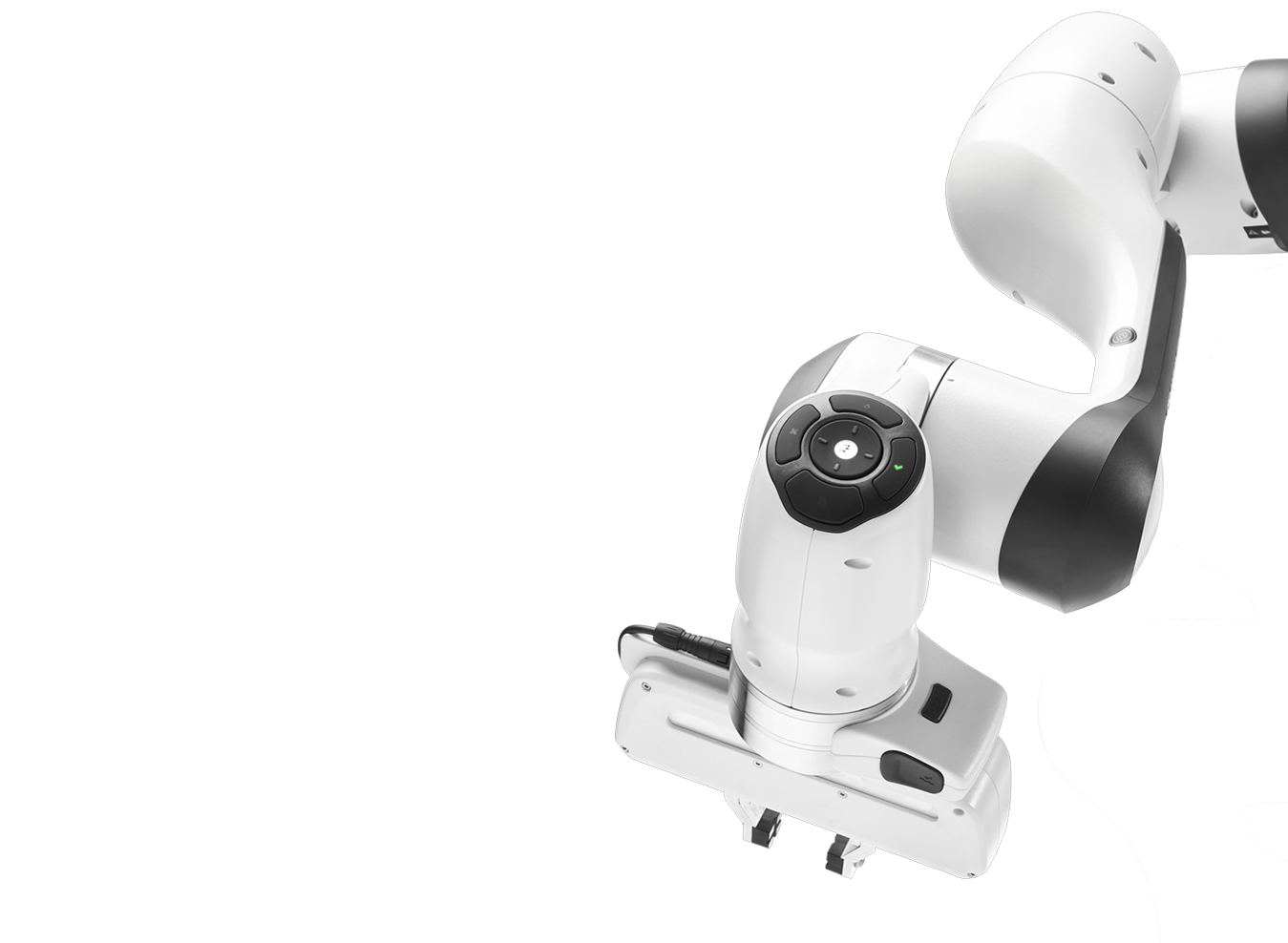
机器人系统
Franka Research 3 的机器人系统包含机械臂及其控制。力度感应灵敏、灵活的机械臂具备 7 DOF,每个关节处都配备扭矩传感器,工业级姿态重复误差率控制在 +/-0.1 毫米以内,即使在高速运转时也能保持极小轨迹偏差。它的有效载荷为 3 公斤,臂展长达 855 毫米,工作空间覆盖率为 94.5%
Download Datasheet
FCI(Franka 控制界面)
FCI 是探索底层编程和控制方案的理想界面,可提供机器人的当前状态,并以 1 kHz 的频率实现直接扭矩控制。除 C++ 界面 libfranka 外,还可与时下最热门的生态系统 ROS、ROS2 和 MATLAB & Simulink 集成!
Documentation
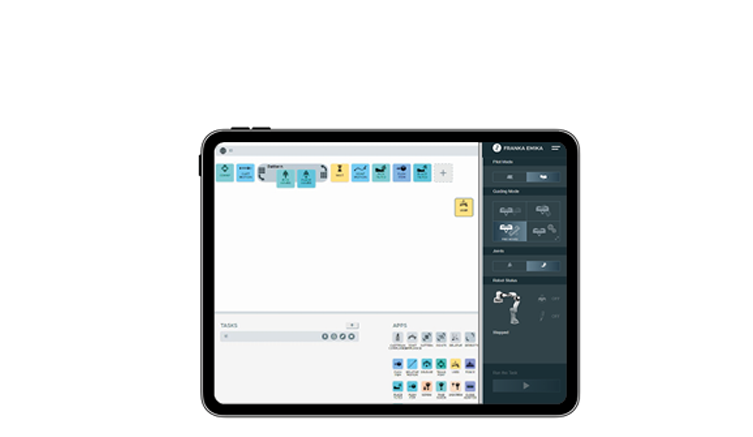
DESK
Desk 是基于浏览器的用户界面,提供快速的机器人控制选项,可以将应用程序拖放到队列中,快速创建整个任务。非常适合快速创建原型机器人行为,设置实验,简单的人机交互研究和演示。
Watchman
简单易用,快速实现安全。由于采用了基于浏览器的用户界面 Watchman,通常复杂的安全设置如今得到大大简化,从而确保您的实验室和实验室工作人员得到保护。

„Franka Emika 机器人系统非常适合我们在开放式环境中进行反应性、鲁棒性操作研究。它也非常适合用于我们与人一起进行协作操作的工作。”
Dieter Fox - NVIDIA机器人研究高级总监
„人类和机器人的智慧大不相同;通过互动,我们可以将各种技能结合起来,从而完成比单独工作能够完成的更多任务"。
Leila Takayama,加利福尼亚大学人机交互副教授

„我们需要新一代机器人来开拓机器人应用的新纪元。Franka Emika 为突破现实世界机器人应用中的新挑战奠定坚实的基础。“
Oussama Khatib - 斯坦福大学机器人实验室主任
资源和社区
由强大的机器人平台支持的开放式全球研究生态系统,可更快地取得成果和发表论文。Franka Research 3 是一个参考平台,可整合现有研究、分享突破和项目合作、复制研究以及通过社区推广论文。
获得您的Franka Research 3研究平台
通过末端执行器和附加软件进一步增强平台

Franka Hand
Franka Emika 的 Hand 是带有可更换指尖的 2 指夹爪,与 Franka Research 3 的软件完全集成,因此也是插拔型,简单易用。此夹爪可轻松更换,适用于各种需要抓取的物体,例如使用 3D 打印指尖。
FR3 应用程序套餐
应用程序是模块化的构建块,可以结合到应用程序工作流中,以快速构建机器人行为的原型。每个应用程序都包含一个上下文菜单,用户可以交互式地输入参数,例如速度和力量,还可以通过模拟演示设置机器人姿势。
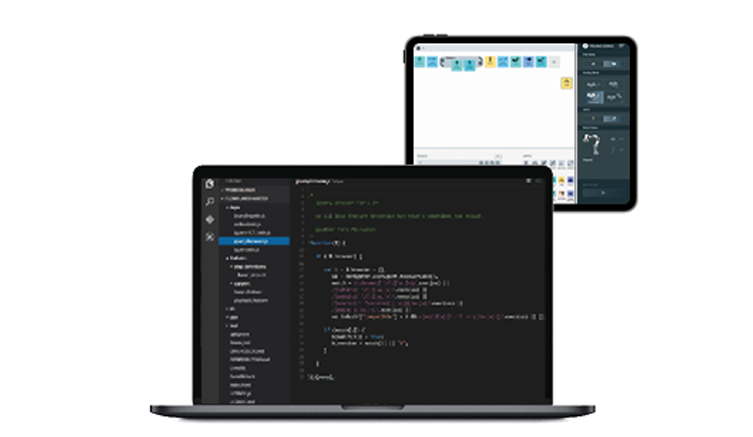
RIDE
RIDE 是用于编写自定义应用程序和连接第三方硬件和外部资源的开发界面。它是定制和扩展系统功能的理想工具。
适用于每种用例的正确接口
对机器人设置三个访问级别,以解决不同的需求和技能,为全领域机器人研究提供服务。

| DESK | RIDE | FCI | |
|---|---|---|---|
| 使用应用程序进行基于工作流的编程 | • | ||
| 快速制作实验和演示原型 | • | ||
| 执行机器人任务 | • | • | |
| 开发定制型应用程序 | • | ||
| 连接第三方硬件 | • | • | |
| 连接外部资源 | • | • | |
| 1 kHz 扭矩、位置和速度控制 | • | ||
| 1 kHz 传感器信号和机器人状态测量 | • | ||
| 获取机器人运动学和动力学模型 | • | ||
| 与 ROS 以及 MATLAB 和 Simulink 集成 | • |
从 AI、ML、机器人控制和运动规划,到操作和 HRI。
FRANKA RESEARCH 3 为处于人工智能和机器人技术前沿的研究人员提供了一个参考型力感应机器人平台和功能强大的控制界面,可快速获得结果并进行发布。该平台还为研究人员提供低门槛,方便其研究机器人手臂以实现实验设置自动化,同时还支持机器人控制和自动化课程的教学。
Guided Uncertainty Aware Policy Optimization
Motion Reasoning for Goal-Based Imitation Learning

RLBench: The Robot Learning Benchmark

Constrained Probabilistic Movement Primitives for Robot Trajectory Adaptation

Reinforcement Learning for Robotic Rock Grasp Learning in Off-Earth Space Environments
Learning Generalizable Coupling Terms for Obstacle Avoidance via Low-Dimensional Geometric Descriptors
6-DOF Grasping for Target-driven Object Manipulation in Clutter
Provably Safe and Efficient Motion Planning with Uncertain Human Dynamics

A novel adaptive controller for robot manipulators using active inference
A Teleoperation Interface for Loco-manipulation Control of MOCA

Planning Maximum-Manipulability Cutting Paths - RRT*-RMM

Online Replanning in Belief Space for Partially Observable Task and Motion Problems
Object-Centric Task and Motion Planning in Dynamic Environments
Scaffold Learning: Learning to Scaffold the Development of Robotic Manipulation Skills
Learning to Generate 6-DoF Grasp Poses with Reachability Awareness

Learning Pregrasp Manipulation of Objects from Ungraspable Poses

Interaction Force Computation Exploiting Environment Stiffness Estimation for Sensorless Robot Applications

Feedback-based Fabric Strip Folding
Describing Physics For Physical Reasoning: Force-based Sequential Manipulation Planning

Deep Visual Reasoning: Learning to Predict Action Sequences for Task and Motion Planning from Images
A Capability-Aware Role Allocation Approach to Industrial Assembly Tasks
A Framework for Human-Robot Interaction User Studies
Search-Based Task Planning with Learned Skill Effect Models for Lifelong Robotic Manipulation

A Shared Autonomy Reconfigurable Control Framework for Telemanipulation of Multi-arm Systems
