- 科研版FR3
- FRANKA WORLD
- 关于我们
- 联系方式
- FCI手册(中文版)
- 更多 +
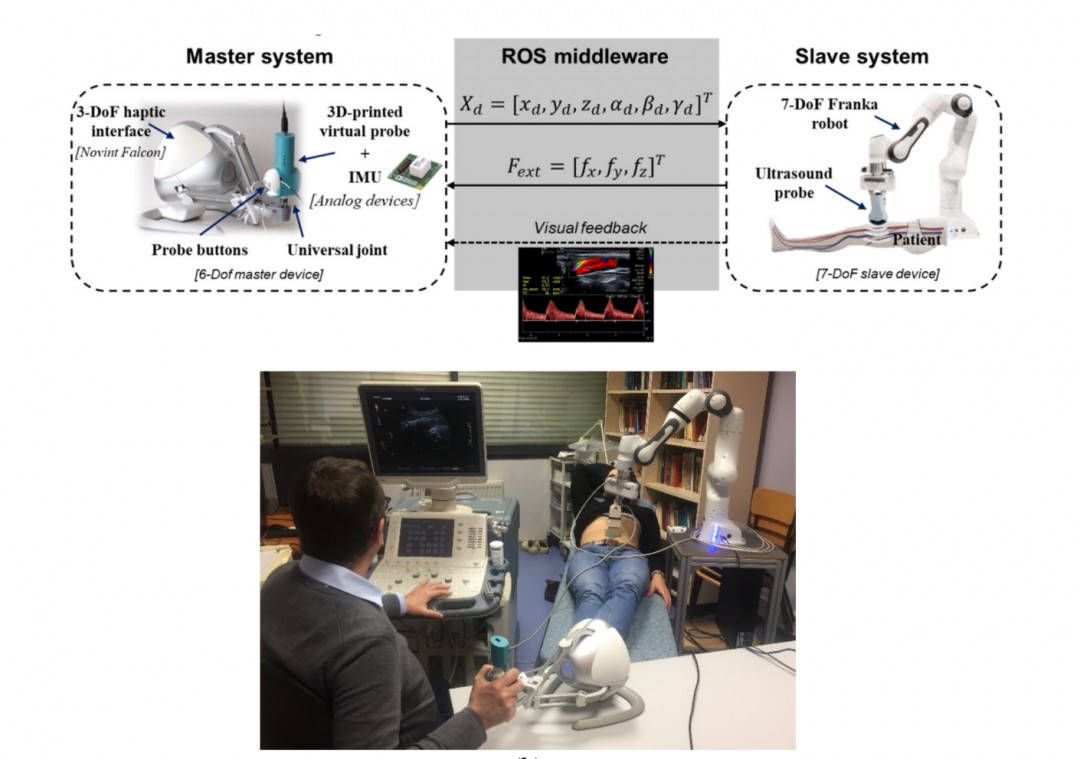
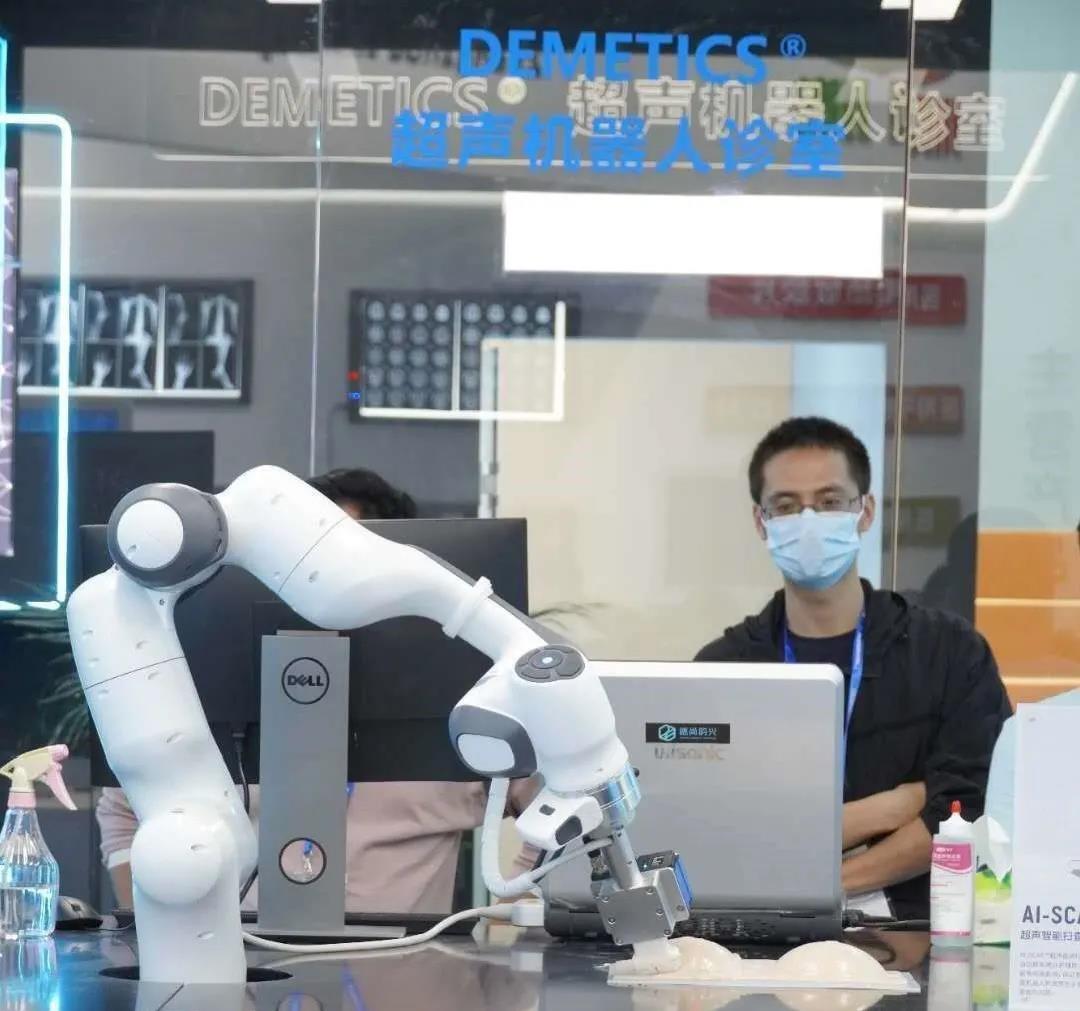
医生通过手势控制,语音控制,或者脚踏板控制来告诉机器人他需要什么工具。机器人快速识别后将工具传递给医生。此类案例机器人多以助手的形式出现如传递物品,辅助定位,预判报警等,机器人并不直接参与手术或治疗,在一定程度上降低了项目的风险,增加了项目的可行性和可复制性。 在2020年的医博会上(CMFF2020)由德尚韵兴发布的扫查机器人,可模仿医生扫查手法,支持各种角度全自动扫查。主动柔顺技术可以解决呼吸影响,保证安全并提高成像质量,此类案例机器人当作医生的执行手臂,代替医生的手部动作,但机器人本身并不参与分析(搭载其他智能分析软件后可执行分析),将扫查行为标准化和可远程化是本项目的一个技术亮点。 伴随着人口的老龄化,独居老人或肢体受伤类病人的护理问题受到了国内外医疗科技公司的关注。下图是某知名科技公司联手Franka Emika 开发的护理机器人。应用Franka机器人独特的力敏感性,接触式帮助患者进行肢体动作。也可以通过机器人完成取药倒水等动作。 受新冠影响,国内外多家医疗科技公司使用Franka Emika 机器人做鼻和咽喉的Covid-19筛查。在国内,云百生联合深圳市罗湖医院集团开发的鼻拭子机器人在技术上取得了非常大的突破。通过视觉引导实现面部跟踪,雷达探头确认鼻球位置精准的判断了鼻腔的位置,再通过机器人的力敏感度探入式进入鼻腔,较高的力敏感度确保人有舒适的体验。 由Franka Emika GmbH 的控股公司TQ-group联合国内某知名理疗公司联合开发的刮痧机器人在一定程度上论证了力控技术在与人接触式开放环境中的必要性。通过简单的几点示教,机器人不需要视觉判断就能根据力反馈完成背部的刮痧任务。 总结:医疗领域机器人的应用面临的问题是巨大的,但前景也是巨大的。只有做好充分的准备和探索,才能在不久的将来抓住机遇,乘风向前。